American Journal of Circuits, Systems and Signal Processing, Vol. 2, No. 1, December 2016 Publish Date: Nov. 2, 2016 Pages: 1-5
The Implementation of Wiener Filtering Deconvolution Algorithm Based on the Pseudo-Random Sequence
Zhen Xiao-dan, Luo Xuan-chi-cheng, Li Mei*
School of Information Engineering, China University of Geosciences (Beijing), Beijing, China
Abstract
In order to get a better display in correlation identification, there are two types of deconvolution algorithms applied in correlation identification theory, which includes traditional frequency domain deconvolution algorithm and Wiener filtering deconvolution algorithm. This article derived the derivation of Wiener filter deconvolution and solved the zero problem traditional frequency domain deconvolution problem, and gave out the frequency domain expression of the system impulse response of the Wiener deconvolution filter. Then, after the comparison of the two deconvolution algorithms, it was shown that the identification results of the Wiener filter deconvolution algorithm were better than traditional frequency domain deconvolution algorithm when using the m-sequence as the system’s input signal. Finally, the Wiener filtering deconvolution algorithm was applied into correlation identification theory and achieved good identification results.
Keywords
Correlation Identification, M-Sequences, Traditional Frequency Domain Deconvolution Algorithm, Wiener Filtering Deconvolution Algorithm
Received: October 13, 2016
Accepted: October 26, 2016
Published online: November 2, 2016
@ 2016 The Authors. Published by American Institute of Science. This Open Access article is under the CC BY license. http://creativecommons.org/licenses/by/4.0/
1. Introduction
Wiener filter deconvolution algorithm can not only improve the traditional frequency domain deconvolution algorithm zero problem which exhibits an abnormal fluctuation of the waveform on the time-domain identification [1], but also be suppressed by the impact and noise imaging system in order to obtain the best estimate of the signal and to improve recognition results [2]. Therefore, the Wiener filter deconvolution algorithm is used in many fields. Deconvolution has important applications in correlation identification algorithm [3]. However, zero problem in traditional frequency domain deconvolution algorithm makes the results unreliable and leads to the failure of deconvolution. To solve zero problem in traditional frequency domain deconvolution algorithm, this essay applied the Wiener filter deconvolution algorithm into correlation identification. After comparing the simulated time domain identification effect of two algorithms, it could be found that the result of the Wiener filter deconvolution algorithm was better than the traditional frequency domain deconvolution algorithm.
2. Methods
Deconvolution problems in engineering are frequently encountered in many areas such as communications, measurement, seismology, optics and astronomy.Because the measurement output from the system is always accompanied by a noise so that tiny faults in the data could make the deconvolution generate different from the true value or the result of serious errors. In addition, using the traditional frequency domain deconvolution algorithm to find the results of deconvolution directly may lead to an infinite impulse response and does not match the actual response, which means zero problem happens in the input of the system. On account of these two reasons, it is difficult to use the traditional frequency domain deconvolution algorithm to solve deconvolution directly [4]. However, using wiener filtering deconvolution algorithm could improve the two defects that could get the best estimate of the true signal in the minimum mean square error sense. It also helped improve zero problem of the traditional frequency domain deconvolution algorithm to some degree [1].
a) Introduction of m-sequence
M-sequence is the most common form of pseudo-random coding sequence, the longest linear feedback shift register sequences, which is the longest cycle sequence generated by the shift register with linear feedback. It is not only having a sharp autocorrelation properties like random noise but also having a periodicity. Therefore, it is easy to create and copy [5]. Because of these characteristics, m-sequences is widely used in communications, radar, system reliability testing and other aspects.
The generate schematic of m-sequences is shown in Fig. 1.
![]() (1)
(1)
In (1), autocorrelation function of m-sequence is similar with autocorrelation function of white noise which is an impulse response d(t) [6].
b) Deconvolution
In mathematics, deconvolution is an algorithm-based process used to reverse the effects of convolution on recorded data. The concept of deconvolution is widely used in the techniques of signal processing and image processing. Because these techniques are widely used in many scientific and engineering disciplines, deconvolution finds many applications [7].
In general, the object of deconvolution is to find the solution of a convolution equation of the form:
f * g = h (2)
Usually, h is some recorded signal, and f is some signal that we wish to recover, but has been convolved with some other signal g before we recorded it. The function g can represent the transfer function of an instrument or a driving force that is applied to a physical system. If we know g, or at least know the form of g, then we can perform deterministic deconvolution. However, if we do not know g in advance, then we need to estimate it. This is usually done using methods of statistical estimation.
In physical measurements, the situation is usually closer to
(f * g) + e = h (3)
In this case e is noise that has entered our recorded signal. If we assume that a noisy signal or image is noiseless when we try to make a statistical estimate of g, our estimate will be incorrect. Similarly, our estimate of f will also be incorrect. The lower the signal-to-noise ratio, the worse our estimate of the deconvolved signal will be. That is the reason why inverse filtering the signal is usually not a good solution. However, if we have at least some knowledge of the type of noise in the data, we may be able to improve the estimate of f through techniques such as Wiener deconvolution.
Deconvolution belongs to a class of "Inverse Problem" in mathematical physics. Signal output obtained through a system is a positive question called convolution integral in mathematics and its inverse problem is deconvolution. Deconvolution has broad application prospects in the field such as signal restoration, image restoration, diagnostic ultrasound, seismic exploration, speech processing, communications, and radar measurements. Research in deconvolution has many aspects including no spectral reverse convolution problem, morbid problem caused by noise or measurement error, optimal filtering, deconvolution algorithms and applications [8].
c) Traditional Frequency Domain Deconvolution Algorithm
Deconvolution is a class fundamental problem in signal processing, in simple terms, is known by measuring the output and input process system function to retrieve unknown [9]. Here is a brief introduction to traditional frequency domain deconvolution algorithm:
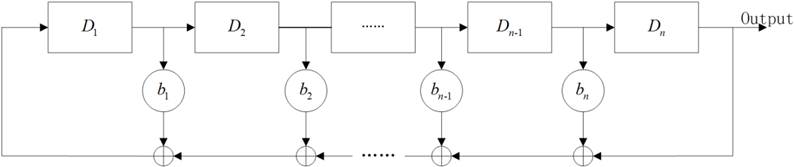
Figure 1. The generate schematic of m-sequence.
The system output is:
y(n) = x(n) * h(n) (4)
In the (4), y(n) is system output, x(n) is system output, h(n) is system impulse response.
Doing Fourier transform to (2) on both sides of the equal sign can be obtained [10],
Y(w) = X(w)H(w) (5)
x(n)’s Fourier transform is X(w), y(n)’s Fourier transform is Y(w). Then we can conclude h(n) Fourier transform of system impulse response is H (w).
H(w) = Y(w) / X(w) (6)
Doing inverse of discrete Fourier transform to (6) obtains the system impulse response h(n).
d) Wiener Filter
In signal processing, the Wiener filter is a filter used to produce an estimate of a desired or target random process by linear time-invariant (LTI) filtering of an observed noisy process, assuming known stationary signal and noise spectra, and additive noise. The Wiener filter minimizes the mean square error between the estimated random process and the desired process.
The goal of the Wiener filter is to compute a statistical estimate of an unknown signal using a related signal as an input and filtering that known signal to produce the estimate as an output. For example, the known signal may consist of an unknown signal of interest that has been corrupted by additive noise. The Wiener filter can be used to filter out the noise from the corrupted signal to provide an estimate of the underlying signal of interest. The Wiener filter is based on statistical methods and gives a more statistical account of the theory in the minimum mean square error (MMSE) estimation [11].
Typical deterministic filters are designed for a desired frequency response. However, the design of the Wiener filter takes a different approach. One assumption is to have knowledge of the spectral properties of the original signal and the noise. The other is to seek the linear time-invariant filter whose output would come as close to the original signal as possible. Wiener filters are characterized by the following [12]:
(1) Assumption: signal and additive noise are stationary linear stochastic processes with known spectral characteristics or known autocorrelation and cross-correlation.
(2) Requirement: the filter must be physically realizable causal (this requirement can be dropped, leading to a non-causal solution).
(3) Performance criterion: minimum mean-square error (MMSE).
This filter is frequently used in the process of deconvolution.
The Wiener filter problem has solutions for three possible cases: one where a non-causal filter is acceptable which requires an infinite amount of both past and future data, the case where a causal filter is desired that uses an infinite amount of past data, and the finite impulse response (FIR) case where a finite amount of past data is used.
The Wiener filter has various applications in signal processing, image processing, control systems, and digital communications. These applications generally divided into four main categories: system identification, deconvolution, noise reduction, signal detection. For example, the Wiener filter can be used in image processing to remove noise from a picture [13].
The Wiener filter was proposed by Norbert Wiener during the 1940s and published in 1949. The discrete-time equivalent of Wiener's work was derived independently by Andrey Kolmogorov and published in 1941. Hence the theory is often called the Wiener–Kolmogorov filtering theory [14]. The Wiener filter was the first statistically designed filter to be proposed and subsequently gave rise to many others including the Kalman filter.
e) Wiener Filter Deconvolution Algorithm
In mathematics, Wiener deconvolution is an application of the Wiener filter to the noise problems inherent in deconvolution. It operates in the frequency domain which attempts to minimize the impact of deconvolution noise at frequencies which have a poor signal-to-noise ratio.
The Wiener deconvolution method is widespread used in image deconvolution applications as the frequency spectrum of most visual images is fairly well behaved and can be estimated easily.
Doing inverse of discrete Fourier transform to (4), it obtains the system impulse response h(n). The zero problem is since the divisor cannot be zero, from the theoretical point of view exist this case which when X(w) exists zero or close to zero that (4) is no longer valid and unable to achieve deconvolution [4]. In practice, it exists noise e(n) or interference generally. The generate schematic of wiener filter deconvolution for system identification is shown in Fig. 2.
Then the system output is:
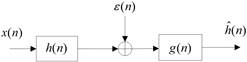
Figure 2. The schematic diagram of wiener filter deconvolution g(n) for system identification.
y(n) = x(n) * h(n) + e(n) (7)
Doing discrete Fourier transform to the equal on both sides of (7), it obtains after division:
H(w) = (Y(w) - E(w)) / X(w) (8)
The amplitude at these points may be small even if H(w) haven’t the spectrum zero real value of zero. When we get H(w) from (8), if small value of noise causes a greater variation and transforms the time-domain to cover the entire or most of the signal, it will distort the inversion of the system impulse response [15]. Therefore, we consider to use Wiener filtering deconvolution algorithm to solve this problem.
It supposed a filter g(n) which input y(n) and output![]() :
:
![]() (9)
(9)
Then, here was condition of satisfaction:
![]() (10)
(10)
According to the orthogonal principle of linear mean square estimation, it must be guaranteed:
![]() (11)
(11)
The signal is assumed to be generalized and making both sides of the equal sign of (9) correlation calculation [16].
Rhy(n) =Ryy(n) * g(n) (12)
Then applyingdiscrete Fourier transform to the equation (12),
Shy(w) = Syy(w)G(w) (13)
It got an expression of the Wiener filter after derivation,
![]() (14)
(14)
Shh(w), Shy(w), Snn(w) are the system impulse response of auto-power spectrum, the cross-power spectrum and the auto-power spectrum of noise.
From (14), it got the system frequency domain representation of the impulse response:
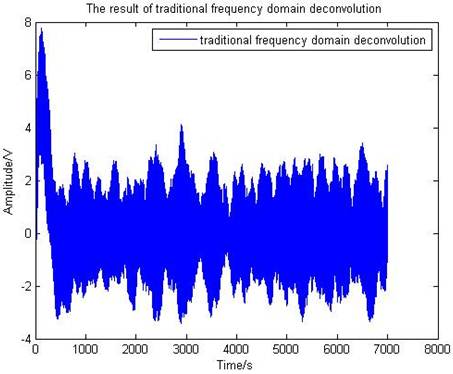
Figure 3. The time-domain identification rendering of Traditional frequency domain deconvolution.
![]() (15)
(15)
In general, the reciprocal ratio of the system impulse response and the noise power spectrum Snn(w)/Shh(w) was replaced by a number g and according to the general order of magnitude it took 0.01 by simulation experience to ensure recognition results.
3. Experiment and Result
A simulation experiment of a typical second-order system was done by MATLAB. Given a second-order system under test which system impulse response was:
h(t) = 11.5e - 5tsin(8.6t) (16)
In (16), input cycle number was 1, the amplitude was 1V, the sequence order was 14m, the system function of the sampling interval was 0.001s, 7s length and random noise added 5V. The time-domain simulation results when using traditional frequency domain deconvolution algorithm was shown as Fig. 3. The time-domain simulation results using Wiener filtering deconvolution algorithm was shown as Fig. 4.
By comparing the two time-domain identification renderings that could clearly be seen in Fig. 4 identification better than 3 and the relevant identification accuracy had a more significant increase than in Figure 3 to improve the zeroproblem of traditional frequency-domain deconvolution algorithm.
4. Conclusions
In the two time-domain identification renderings, the identification results of Fig. 4 are significantly improved in comparison with Fig. 3, which could be concluded as: the identification results of the wiener filtering deconvolution algorithm were superior to the one of the traditional frequency domain deconvolution algorithm. Wiener filter deconvolution algorithm could solve zero problems of the traditional frequency domain deconvolution algorithm and turned down the noise and the impact of imaging system to improve recognition results.
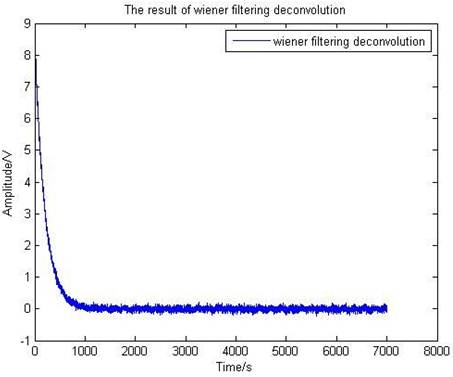
Figure 4. The time-domain identification rendering of Wiener filtering deconvolution.
Due to the limited bandwidth of the system function testing system, the noise fluctuation band directly affects the results of deconvolution, leading to the result of poor stability of the algorithm itself. While the reciprocal ratio g of the system impulse response and of the noise power spectrum is often taken to a constant value. However, the deconvolution result is very sensitive to constant value and the crest is wide after deconvolution so that the improvement of the identification results is not obvious [17]. Through the modification of the reciprocal ratio g of the system impulse response and of the noise power spectrum to improve the Wiener filter, it is possible to further increase the deconvolution accuracy.
References
- Lou Ping-an, Miao Chang, "Deconvolution Theorem". Nuclear Electronics & Detection Technology, vol. 9, No. 6, pp. 454-459, 1999.
- Shu Qing, Zhang You-zheng, "The DFT Algorithms of Deconvolution for X(k) Having Zeros", Acta Electronica Sinica, vol. 18, No. 3, pp. 83-89, 1990.
- Guo Jian-zhong, Chen Sen-Lin, "A Modified Means to Wiener Inverse Filter for Improving Vertical Resolution of Ultrasonic Signals", Journal of Shanxi Normal University (Natural Science Edition), vol. 32, No. 2, pp. 40-42, 2004.
- Deng Zi-li, Zhang Li-bo, "White Noise Wiener Deconvolution Filters", Control and Decision, vol. 16, No. 4, pp. 488-490, 2001.
- Li Mei, "Research of Time-Domain Spectrum IP Based on Correlation Identification Technology", pp. 21-32, 2010.
- Fan Chang-xin, Communication Theory [M]. Beijing: National Defend Industry Press, pp. 376-389, 2001.
- Chen Xiaoxin, Qian Yong, "Study of UHF Partial Discharge Sensor Time Domain Parameters Based on Frequency Domain Deconvolution", High Voltage Engineering, Vol. 41, No. 5, pp. 1488-1494, 2015.
- Zou An, "A Stimulus-sequence Optimization Technique and Deconvolution Method for Auditory Evoked Potentials, pp. 28-34.
- Zeng Xiao-ling, "Deconvolution and Deconvolution Algorithm", Journal of Electronic Measurement and Instrument, vol. 3, No. 4, pp. 25-33, 1989.
- Liu Ming-ling, Cai Yong-quan, Rao Min and Liu Di, "Deconvolution Via Convolution Operation", Acta Electronica Sinica, vol. 28, No. 5, pp. 111-112, 2000.
- Rong Qing, Xiao Han, "Study on MMSM Wiener filtering-based speech enhancement method and its Matlab implementation", Computer Applications and Software, vol. 32, No. 1, pp. 153-157, 2015.
- Ding Yumei, Kuo Yonghong, Digital Signal Processing - Time Domain Discrete Random Signal Processing [M]. Beijing: National Defend Industry Press, pp. 30-33, 2002.
- Lin Hui, Miao Yongmei, "Research on Wiener Filtering De-noising Algorithm", Value Engineering, pp. 180, 2012.
- Yuan Lanjing, "Application of wavelet transform in Signal Denoise", pp. 5-7, 2008.
- Shu Qing, Zhang You-zheng, "Rediscuss the DFT Algorithms of Deconvolution for X(k) Having Zeros", Acta Electronica Sinica, vol. 20, No. 12, pp. 79-81, 1992.
- Zheng Rong, "Deconvolution Caculation of Signal Processing", Signal Processing, vol. 11, No. 2, pp. 82-87, 1995.
- Guo Jian-zhong, Lin Shu-Yu, "A Modified Wiener Inverse Filter for Deconvolution in Ultrasonic Detection", Applied Acoustics, vol. 24, No. 2, pp. 97-102, 2005.
Biography
|
|
|
|
|
|






