
Systems Science and Applied Mathematics, Vol. 1, No. 3, December 2016 Publish Date: Jan. 9, 2017 Pages: 29-37
Design of FIR Smoother Using Covariance Information for Estimating Signal at Start Time in Linear Continuous Systems
Seiichi Nakamori*
Department of Technology, Faculty of Education, Kagoshima University, Kagoshima, Japan
Abstract
This paper, as a first attempt, examines to design the recursive least-squares (RLS) finite impulse response (FIR) smoother, which estimates the signal at each start time of the finite-time interval in linear continuous-time stochastic systems. It is assumed that the signal is observed with additive white noise and is uncorrelated with the observation noise. It is a characteristic that the FIR smoother uses the covariance information of the signal process in the form of the semi-degenerate kernel and the variance of the observation noise besides the observed value. This paper also presents the recursive algorithm for the estimation error variance function of the RLS-FIR smoother to show the stability condition of the smoother.
Keywords
FIR Smoother, Linear Continuous-Time Stochastic Systems, Wiener-Hopf Integral Equation, White Observation Noise, Convolution Integral
Received: November 7, 2016
Accepted: December 21, 2016
Published online: January 9, 2017
@ 2016 The Authors. Published by American Institute of Science. This Open Access article is under the CC BY license. http://creativecommons.org/licenses/by/4.0/
Contents
1. Introduction
The Kalman filter estimates the signal recursively based on the state-space model of the signal process. The filtering estimate at time t uses the updated observed value. In [1], the finite impulse response (FIR) filter and smoother are proposed for continuous time-invariant state-space models. In the algorithms of the FIR estimators, the Riccati-type differential equations are calculated on a finite-time interval. Compared with growing-memory for the conventional filter, the FIR filter has the property of improving filter divergence due to modeling errors and sudden changes of the signals in systems [2, 3]. Jazwinski [2] and Schweppe [3] introduce the FIR filter for discrete-time state-space models without driving noises. Bruckstein and Kailath [4] propose recursive FIR filter for the general state-space models with driving noise for both continuous-time and discrete-time stochastic systems. In [5-7], receding horizon Kalman FIR filter is devised in continuous-time and discrete-time stochastic systems. The horizon FIR filter is derived based on the information form of the Kalman filter. Also, the ![]() smoother [8] and the
smoother [8] and the ![]() smoother [9], with the FIR structure, for discrete-time state-space signal models, are presented. As alternatives to the Kalman estimators based on the state-space models, the filter, the fixed-point smoother [10] and the fixed-lag smoother [11] are devised by using the covariance information of the signal and observation noise processes. In [10] and [11], the auto-covariance function of the signal process is expressed in the form of the semi-degenerate kernel. In [12], the extended recursive Wiener fixed-point smoother and filter are presented in discrete-time wide-sense stationary stochastic systems. Here, it is assumed that the signal is observed with the nonlinear mechanism of the signal and with additional white observation noise. In [12] the estimators do not use the information of the input matrix and the variance of the input noise. In [13], the recursive least-squares (RLS) Wiener finite impulse response (FIR) filtering algorithm is presented in linear discrete-time stochastic systems. The RLS Wiener FIR filter uses the following information: (1) The observation matrix for the signal, (2) the system matrix for the state vector, (3) the variance of the state vector. In [14], by using the covariance information, the RLS-FIR filter is designed in linear continuous-time stochastic systems. In [14], the auto-covariance function of the signal process is expressed in the form of the semi-degenerate kernel. Also, in linear discrete-time stochastic systems, the RLS Wiener FIR fixed-lag smoothing algorithm [15] is proposed by using the covariance information.
smoother [9], with the FIR structure, for discrete-time state-space signal models, are presented. As alternatives to the Kalman estimators based on the state-space models, the filter, the fixed-point smoother [10] and the fixed-lag smoother [11] are devised by using the covariance information of the signal and observation noise processes. In [10] and [11], the auto-covariance function of the signal process is expressed in the form of the semi-degenerate kernel. In [12], the extended recursive Wiener fixed-point smoother and filter are presented in discrete-time wide-sense stationary stochastic systems. Here, it is assumed that the signal is observed with the nonlinear mechanism of the signal and with additional white observation noise. In [12] the estimators do not use the information of the input matrix and the variance of the input noise. In [13], the recursive least-squares (RLS) Wiener finite impulse response (FIR) filtering algorithm is presented in linear discrete-time stochastic systems. The RLS Wiener FIR filter uses the following information: (1) The observation matrix for the signal, (2) the system matrix for the state vector, (3) the variance of the state vector. In [14], by using the covariance information, the RLS-FIR filter is designed in linear continuous-time stochastic systems. In [14], the auto-covariance function of the signal process is expressed in the form of the semi-degenerate kernel. Also, in linear discrete-time stochastic systems, the RLS Wiener FIR fixed-lag smoothing algorithm [15] is proposed by using the covariance information.
In the RLS-FIR filter [14], the estimation of the signal process starts from the finite-time interval ![]() , hence the signal for
, hence the signal for ![]() cannot be estimated. From the reason to be able to estimate the signal for the time interval
cannot be estimated. From the reason to be able to estimate the signal for the time interval ![]() , this paper, as a first attempt, examines to design the RLS-FIR smoother, which estimates the signal at the start time of the finite-time interval
, this paper, as a first attempt, examines to design the RLS-FIR smoother, which estimates the signal at the start time of the finite-time interval ![]() in linear continuous-time stochastic systems. The current topic, estimating the signal at the start time of the finite-time interval, has not been studied elsewhere. It is assumed that the signal is observed with additive white noise and is uncorrelated with the observation noise. The current RLS-FIR smoother uses the covariance information of the signal process and the variance of the observation noise in addition to the observed value. It is a characteristic that the auto-covariance function of the signal process is expressed in the form of the semi-degenerate kernel.
in linear continuous-time stochastic systems. The current topic, estimating the signal at the start time of the finite-time interval, has not been studied elsewhere. It is assumed that the signal is observed with additive white noise and is uncorrelated with the observation noise. The current RLS-FIR smoother uses the covariance information of the signal process and the variance of the observation noise in addition to the observed value. It is a characteristic that the auto-covariance function of the signal process is expressed in the form of the semi-degenerate kernel.
In section 4, the algorithm for the FIR smoothing error variance function is formulated to show the stability condition of the smoother. In section 5, a numerical simulation example is demonstrated to show the estimation properties of the proposed RLS-FIR smoother in comparison with the RLS-FIR filter [14] and the RLS filter [10] using the covariance information.
2. RLS-FIR Smoothing Problem
Let an observation equation be given by
![]() (1)
(1)
in linear continuous-time stochastic systems, where ![]() is an
is an ![]() signal vector and
signal vector and ![]() is white observation noise. It is assumed that the signal and the observation noise are mutually independent stochastic processes with zero means. Let the auto-covariance function of
is white observation noise. It is assumed that the signal and the observation noise are mutually independent stochastic processes with zero means. Let the auto-covariance function of ![]() be given by
be given by
![]() (2)
(2)
Here, ![]() denotes the Dirac
denotes the Dirac ![]() function.
function.
Let ![]() represent the auto-covariance function of the signal and let
represent the auto-covariance function of the signal and let ![]() be expressed in the semi-degenerate kernel form [10], [11], [14] of
be expressed in the semi-degenerate kernel form [10], [11], [14] of
![]() (3)
(3)
Here, ![]() and
and ![]() are bounded
are bounded ![]() matrices.
matrices.
Let the FIR smoothing estimate ![]() of the signal
of the signal ![]() be given by
be given by
![]() (4)
(4)
as a linear integral transformation of the observation process ![]() , where
, where ![]() ,
, ![]() are referred to as the impulse response function and the FIR smoothing estimate of the signal
are referred to as the impulse response function and the FIR smoothing estimate of the signal ![]() respectively. The impulse response function, which minimizes the mean-square value of the FIR smoothing error
respectively. The impulse response function, which minimizes the mean-square value of the FIR smoothing error ![]() ,
,
![]() (5)
(5)
satisfies
![]() (6)
(6)
by an orthogonal projection lemma [16]
![]() (7)
(7)
Here, "![]() " denotes the notation of the orthogonality. From (1), (2) and (6), the impulse response function
" denotes the notation of the orthogonality. From (1), (2) and (6), the impulse response function ![]() , for the linear RLS-FIR smoothing estimates, satisfies the Volterra-type integral equation of the second kind
, for the linear RLS-FIR smoothing estimates, satisfies the Volterra-type integral equation of the second kind
![]() (8)
(8)
In (8), for the variables ![]() and
and ![]() satisfying,
satisfying, ![]() , from the expression (3) of the semi-degenerate kernel,
, from the expression (3) of the semi-degenerate kernel, ![]() is expressed as
is expressed as ![]() . Then, based on the preliminary formulation on the smoothing problem, estimating the signal at the start time of the finite- time interval, the RLS-FIR smoothing algorithm is proposed in section 3.
. Then, based on the preliminary formulation on the smoothing problem, estimating the signal at the start time of the finite- time interval, the RLS-FIR smoothing algorithm is proposed in section 3.
3. RLS-FIR Smoothing Algorithm
From the integral equation (8) for the optimal impulse response function, based on the invariant imbedding method [10], [11], [14], [17]-[23], the RLS-FIR smoothing algorithm is derived. The estimation algorithm is presented in Theorem 1.
Theorem 1 Let the observation equation be given by (1). Let the auto-covariance function of the signal ![]() be given by (3) in the semi-degenerate kernel form in linear continuous-time stochastic systems. Then the algorithm for the RLS-FIR smoothing estimate
be given by (3) in the semi-degenerate kernel form in linear continuous-time stochastic systems. Then the algorithm for the RLS-FIR smoothing estimate ![]() of the signal
of the signal ![]() consists of (9)-(27).
consists of (9)-(27).
FIR smoothing estimate ![]() of
of ![]() :
:
![]() (9)
(9)
![]() (10)
(10)
![]() (11)
(11)
![]() (12)
(12)
![]() (13)
(13)
![]() ,
,
![]() (14)
(14)
![]() ,
,
![]() (15)
(15)
![]() ,
,
![]() (16)
(16)
![]() ,
,
![]() (17)
(17)
![]() ,
,
![]() (18)
(18)
![]() ,
,
![]() (19)
(19)
Initial conditions ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() and
and ![]() required in the differential equations (14)-(19) for
required in the differential equations (14)-(19) for ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() and
and ![]() are calculated by (22)-(27) with (20) and (21).
are calculated by (22)-(27) with (20) and (21).
![]() (20)
(20)
![]() (21)
(21)
![]() ,
,
![]() (22)
(22)
![]() ,
,
![]() (23)
(23)
![]() ,
,
![]() (24)
(24)
![]() ,
,
![]() (25)
(25)
![]() ,
,
![]() (26)
(26)
![]() ,
,
![]() (27)
(27)
Proof of Theorem 1 is deferred to the Appendix.
In section 4, the algorithm for the estimation error variance function of the proposed RLS-FIR smoother is proposed.
4. Estimation Error Variance Function
Referring to the derivation of Theorem 1, from (8), the estimation error variance function ![]() of the proposed RLS-FIR smoother is formulated as follows.
of the proposed RLS-FIR smoother is formulated as follows.
![]()
![]()
=![]()
=![]()
=![]()
Here, ![]() is calculated by (10)-(13) and (16)-(27) recursively. The auto-variance function
is calculated by (10)-(13) and (16)-(27) recursively. The auto-variance function ![]() of the RLS-FIR smoothing estimate
of the RLS-FIR smoothing estimate ![]() is given by
is given by ![]() . Since the FIR smoothing error variance function
. Since the FIR smoothing error variance function ![]() is the positive semi-definite matrix, it is seen that
is the positive semi-definite matrix, it is seen that ![]() is upper bounded by
is upper bounded by ![]() and lower bounded by the zero matrix as
and lower bounded by the zero matrix as
![]() ,
, ![]() . (28)
. (28)
(28) indicates that the proposed RLS-FIR smoother is stable, provided that the function ![]() is bounded.
is bounded.
5. A Numerical Simulation Example
Let a scalar observation equation be given by
![]() (29)
(29)
Let the observation noise ![]() be a zero-mean white Gaussian process with the variance
be a zero-mean white Gaussian process with the variance ![]() ,
, ![]() . Let the auto-covariance function of the signal
. Let the auto-covariance function of the signal ![]() be given by
be given by
![]() (30)
(30)
From (30), the functions ![]() and
and ![]() in (3) are expressed as follows:
in (3) are expressed as follows:
![]() (31)
(31)
If we substitute (31) into the RLS-FIR smoothing algorithm of Theorem 1, we can calculate the FIR smoothing estimate recursively. In the calculations of the differential equations, the 4th order Runge-Kutta-Gill method, with the step size ![]() , is used. Fig. 1 illustrates the signal
, is used. Fig. 1 illustrates the signal ![]() and the FIR
and the FIR
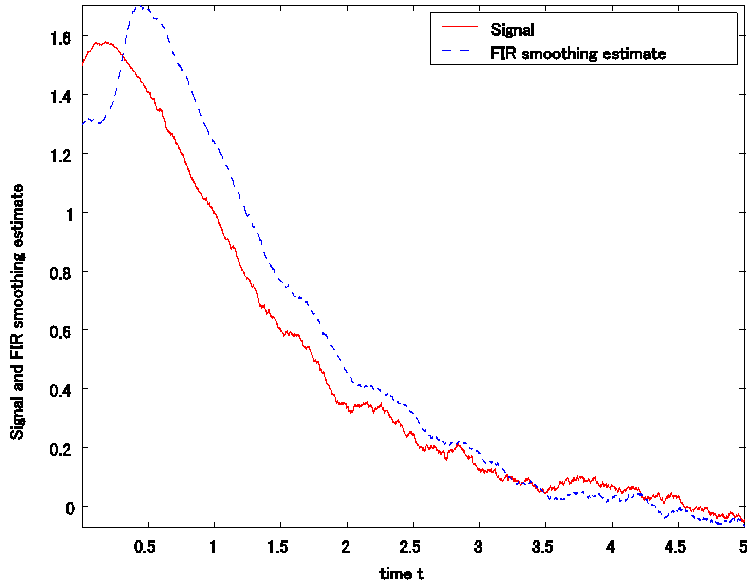
Figure 1. Signal and RLS-FIR smoothing estimate for white observation noise ![]() .
.
smoothing estimate ![]() vs.
vs. ![]() ,
, ![]() , for the white Gaussian observation noise
, for the white Gaussian observation noise ![]() . Here, the value of the finite-time interval
. Here, the value of the finite-time interval ![]() in the RLS-FIR smoother is
in the RLS-FIR smoother is ![]() and the signal
and the signal ![]() at the start time
at the start time ![]() , with the observed values between
, with the observed values between ![]() and
and ![]() , is estimated. From Fig. 1, it is seen that the RLS-FIR smoothing estimate approaches gradually the signal as time
, is estimated. From Fig. 1, it is seen that the RLS-FIR smoothing estimate approaches gradually the signal as time ![]() advances. Table 1 compares the mean-square values (MSVs) of the current FIR smoothing errors,
advances. Table 1 compares the mean-square values (MSVs) of the current FIR smoothing errors, ![]() ,
, ![]() , with those by the RLS-FIR filtering errors [14],
, with those by the RLS-FIR filtering errors [14], ![]() , for the observation noises
, for the observation noises ![]() ,
, ![]() ,
, ![]() and
and ![]() . Table 1 indicates, for both the FIR smoothing and filtering estimates, as the variance of the observation noise becomes small, the estimation accuracies are improved. Also, From Table 1, the estimation accuracy of the proposed RLS-FIR smoother is inferior to the RLS-FIR filter [14]. Table 2 shows the MSVs of the current FIR smoothing errors,
. Table 1 indicates, for both the FIR smoothing and filtering estimates, as the variance of the observation noise becomes small, the estimation accuracies are improved. Also, From Table 1, the estimation accuracy of the proposed RLS-FIR smoother is inferior to the RLS-FIR filter [14]. Table 2 shows the MSVs of the current FIR smoothing errors,![]() , for the observation noises
, for the observation noises ![]() ,
, ![]() ,
, ![]() and
and ![]() . In Table 2, the MSVs are calculated based on 4500 number of FIR smoothing errors for the signal
. In Table 2, the MSVs are calculated based on 4500 number of FIR smoothing errors for the signal ![]() ,
, ![]() , and
, and ![]() . Whereas in Table 1, 2000 number of FIR smoothing errors are used for
. Whereas in Table 1, 2000 number of FIR smoothing errors are used for ![]() ,
, ![]() . Table 3 shows the MSVs of the current FIR smoothing errors,
. Table 3 shows the MSVs of the current FIR smoothing errors,![]() , for the observation noises
, for the observation noises ![]() ,
, ![]() ,
, ![]() and
and ![]() . Here,
. Here, ![]() . In comparison of Table 2 for the finite-time interval
. In comparison of Table 2 for the finite-time interval ![]() with Table 3 for
with Table 3 for ![]() , the estimation accuracy of the proposed FIR smoother in Table 2 is preferable to that in Table 3. This might be based on the fact that, in the case of the finite- time interval
, the estimation accuracy of the proposed FIR smoother in Table 2 is preferable to that in Table 3. This might be based on the fact that, in the case of the finite- time interval ![]() the RLS-FIR smoother uses twice number of the observed values in calculating each FIR smoothing estimate recursively in contrast with
the RLS-FIR smoother uses twice number of the observed values in calculating each FIR smoothing estimate recursively in contrast with ![]() . Table 4 shows the MSVs of the FIR
. Table 4 shows the MSVs of the FIR
Table 1. Mean-square values of the current FIR smoothing errors and FIR filtering errors by [14] in terms of 2000 number of estimation errors for ![]() ,
, ![]() .
.

Table 2. Mean-square values of 4500 number of FIR smoothing errors for ![]() ,
, ![]() .
.

Table 3. Mean-square values of 4500 number of FIR smoothing errors for ![]() ,
, ![]() .
.

smoothing errors, by the current smoother, in terms of 4500 number of estimation errors during ![]() for the observation noises
for the observation noises![]() ,
, ![]() ,
, ![]() and
and ![]() . Here, the finite-time interval is
. Here, the finite-time interval is ![]() . In comparison of Table 4 with Table 2, the estimation accuracy for the finite-time interval
. In comparison of Table 4 with Table 2, the estimation accuracy for the finite-time interval ![]() in Table 4 is almost same as the case of
in Table 4 is almost same as the case of ![]() in Table 2. In Table 4, the MSVs of the filtering errors by the RLS-FIR filter [14] are also shown. The MSVs indicate that the estimation accuracy of the current RLS-FIR smoother is almost same as the RLS-FIR filter [14] for the finite-time interval
in Table 2. In Table 4, the MSVs of the filtering errors by the RLS-FIR filter [14] are also shown. The MSVs indicate that the estimation accuracy of the current RLS-FIR smoother is almost same as the RLS-FIR filter [14] for the finite-time interval ![]() . Table 5 compares the estimation accuracy of the proposed RLS-FIR smoother with the RLS filter [10] in terms of the MSVs. The MSVs are calculated by
. Table 5 compares the estimation accuracy of the proposed RLS-FIR smoother with the RLS filter [10] in terms of the MSVs. The MSVs are calculated by ![]() ,
, ![]() , in the current FIR smoother, and
, in the current FIR smoother, and ![]() in the RLS filter [10] for the observation noises
in the RLS filter [10] for the observation noises![]() ,
, ![]() ,
, ![]() and
and ![]() . Table 5 indicates that the estimation accuracy of the proposed RLS-FIR smoother is superior to the RLS filter [10]. Since the FIR filter does not calculate the estimate for
. Table 5 indicates that the estimation accuracy of the proposed RLS-FIR smoother is superior to the RLS filter [10]. Since the FIR filter does not calculate the estimate for ![]() , compared with the RLS filter, the proposed RLS-FIR smoother is feasible in estimating the signal for the time interval.
, compared with the RLS filter, the proposed RLS-FIR smoother is feasible in estimating the signal for the time interval.
Table 4. Mean-square values of the current FIR smoothing errors and FIR filtering errors by [14] in terms of 4500 number of estimation errors for ![]() ,
, ![]() .
.

Table 5. Mean-square values of the current FIR smoothing errors and filtering errors by [10] in terms of 500 number of estimation errors for ![]() ,
, ![]() .
.

For references, the state-space model, which generates the signal process, is specified by
![]()
![]()
![]()
6. Conclusions
In the RLS-FIR filter [14], the estimation of the signal process starts from the finite-time interval ![]() , hence the signal for the time interval,
, hence the signal for the time interval, ![]() , is not estimated. From the reason to be able to estimate the signal for the time interval,
, is not estimated. From the reason to be able to estimate the signal for the time interval, ![]() , this paper, as a first attempt, proposes the RLS-FIR smoother, which estimates the signal at the start time of the finite-time interval
, this paper, as a first attempt, proposes the RLS-FIR smoother, which estimates the signal at the start time of the finite-time interval ![]() in linear continuous-time stochastic systems. The numerical simulation example has shown that the current RLS-FIR smoother is feasible. Also, the algorithm for the RLS-FIR smoothing error variance function and the condition for the stability of the RLS-FIR smoother are shown.
in linear continuous-time stochastic systems. The numerical simulation example has shown that the current RLS-FIR smoother is feasible. Also, the algorithm for the RLS-FIR smoothing error variance function and the condition for the stability of the RLS-FIR smoother are shown.
The proposed RLS-FIR smoother has the following properties.
(1) As the variance of the white observation noise becomes small, the estimation accuracy of the RLS-FIR smoother is improved.
(2) In the simulation, the estimation accuracies of the proposed RLS-FIR smoother for the finite-time intervals ![]() and
and ![]() are almost same. Also, for
are almost same. Also, for ![]() and
and ![]() , the estimation accuracy of the proposed RLS-FIR smoother is almost same as the RLS-FIR filter [14]. In addition, in the proposed RLS-FIR smoother, the estimation accuracies for
, the estimation accuracy of the proposed RLS-FIR smoother is almost same as the RLS-FIR filter [14]. In addition, in the proposed RLS-FIR smoother, the estimation accuracies for ![]() and
and ![]() are superior to the case of
are superior to the case of ![]() .
.
(3) Since the RLS-FIR filter [14] does not calculate the estimate for ![]() , compared with the RLS filter [10], from the point of the estimation accuracy, the proposed RLS-FIR smoother is feasible in estimating the signal for the time interval.
, compared with the RLS filter [10], from the point of the estimation accuracy, the proposed RLS-FIR smoother is feasible in estimating the signal for the time interval.
Appendix Proof of Theorem 1
From the auto-covariance function (3) of the signal in the semi-degenerate kernel, (8) is rewritten as
![]() (A-1)
(A-1)
Let us introduce an auxiliary function ![]() , which satisfies
, which satisfies
![]() (A-2)
(A-2)
From (A-1) and (A-2), we obtain an expression for the optimal impulse response function
![]() (A-3)
(A-3)
Differentiating (A-2) with respect to ![]() , we have
, we have
![]() (A-4)
(A-4)
From (3), for ![]() ,
, ![]() is valid. Hence, (A-4) is rewritten as
is valid. Hence, (A-4) is rewritten as
![]() (A-5)
(A-5)
Let us introduce an auxiliary function ![]() , which satisfies
, which satisfies
![]() (A-6)
(A-6)
From (A-2) and (A-6), we obtain
![]() (A-7)
(A-7)
In a similar manner, differentiating (A-6) with respect to ![]() and using (A-2) and (A-6), we obtain
and using (A-2) and (A-6), we obtain
![]() (A-8)
(A-8)
Putting ![]() in (A-2), we have
in (A-2), we have
![]() (A-9)
(A-9)
From (3), in (A-9), ![]() is valid for
is valid for ![]() . Introducing a function
. Introducing a function
![]() (A-10)
(A-10)
we obtain (10). Similarly, putting ![]() in (A-2), and introducing a function
in (A-2), and introducing a function
![]() (A-11)
(A-11)
we obtain (12).
Putting ![]() in (A-6), we have
in (A-6), we have
![]() (A-12)
(A-12)
From (3), in (A-12), ![]() is valid for
is valid for ![]() . Introducing a function
. Introducing a function
![]() (A-13)
(A-13)
we obtain (11). Similarly, putting ![]() in (A-6), and introducing a function
in (A-6), and introducing a function
![]() (A-14)
(A-14)
we obtain (13).
Differentiating (A-10) with respect to ![]() , we have
, we have
![]() (A-15)
(A-15)
Substituting (A-7) into (A-15) and using (A-10) and (A-13), we obtain (16).
Differentiating (A-13) with respect to ![]() , we have
, we have
![]() (A-16)
(A-16)
Substituting (A-8) into (A-16) and using (A-10) and (A-13), we obtain (17).
Differentiating (A-11) with respect to ![]() , we have
, we have
![]() (A-17)
(A-17)
Substituting (A-7) into (A-17) and using (A-11) and (A-14), we obtain (18).
Differentiating (A-14) with respect to ![]() , we have
, we have
![]() (A-18)
(A-18)
Substituting (A-8) into (A-18) and using (A-11) and (A-14), we obtain (19).
Substituting (A-3) into (4), we have
![]() (A-19)
(A-19)
Introducing a function
![]() (A-20)
(A-20)
we obtain (9) for the FIR smoothing estimate ![]() .
.
Differentiating (A-20) with respect to ![]() , we have
, we have
![]() (A-21)
(A-21)
Substituting (A-7) into (A-21) and introducing
![]() (A-22)
(A-22)
we obtain (14). Similarly, differentiating (A-22) with respect to ![]() , we have
, we have
![]() (A-23)
(A-23)
Substituting (A-8) into (A-23), and using (A-20) and (A-22), we obtain (15).
From (A-10), the initial condition on the differential equation for ![]() at
at ![]() is given by
is given by
![]() (A-24)
(A-24)
Corresponding to ![]() , we introduce, from (A-2), a function
, we introduce, from (A-2), a function ![]() , which satisfies
, which satisfies
![]() (A-25)
(A-25)
Here, we note that ![]() . Hence, we introduce
. Hence, we introduce
![]() (A-26)
(A-26)
In (16), the initial condition ![]() is given as the value of
is given as the value of ![]() at
at ![]() . Let us differentiate (A-25) with respect to
. Let us differentiate (A-25) with respect to ![]() .
.
![]() (A-27)
(A-27)
Let us introduce an equation, which ![]() satisfies
satisfies
![]() (A-28)
(A-28)
Taking into account of the auto-covariance function ![]() in (3) for
in (3) for ![]() and using (A-28), we obtain
and using (A-28), we obtain
![]() (A-29)
(A-29)
Differentiating (A-26) with respect to ![]() , we have
, we have
![]() (A-30)
(A-30)
Substituting (A-29) into (A-30) and introducing
![]() (A-31)
(A-31)
we obtain (24) for ![]() with the initial condition
with the initial condition ![]() .
.
Differentiating (A-31) with respect to ![]() , we have
, we have
![]() (A-32)
(A-32)
Differentiating (A-28) with respect to ![]() , we have
, we have
![]() (A-33)
(A-33)
Taking into account of the auto-covariance function ![]() in (3) for
in (3) for ![]() and using (A-28), we obtain
and using (A-28), we obtain
![]() (A-34)
(A-34)
Substituting (A-34) into (A-32) and using (A-31), we obtain (25) for ![]() with the initial condition
with the initial condition ![]() .
.
From (A-11), the initial condition on the differential equation for ![]() at
at ![]() is given by
is given by
![]() (A-35)
(A-35)
Corresponding to ![]() , we introduced, from (A-2), a function
, we introduced, from (A-2), a function ![]() , which satisfies (A-25). Here,
, which satisfies (A-25). Here, ![]() is valid. Hence, we introduced
is valid. Hence, we introduced
![]() (A-36)
(A-36)
In (18), the initial condition ![]() is given as the value of
is given as the value of ![]() at
at ![]() .
.
Differentiating (A-36) with respect to ![]() , we have
, we have
![]() (A-37)
(A-37)
Substituting (A-29) into (A-37) and introducing
![]() (A-38)
(A-38)
we obtain (26) for ![]() with the initial condition
with the initial condition ![]() .
.
Differentiating (A-38) with respect to ![]() , we have
, we have
![]() (A-39)
(A-39)
Substituting (A-34) into (A-39), we obtain (27) for ![]() with the initial condition
with the initial condition ![]() .
.
Putting ![]() in (A-25), we have
in (A-25), we have
![]() (A-40)
(A-40)
From (3), ![]() ,
, ![]() , is valid. From (A-26), we obtain (20).
, is valid. From (A-26), we obtain (20).
Putting ![]() in (A-28), we have
in (A-28), we have
![]() (A-41)
(A-41)
From (3), ![]() ,
, ![]() , is valid. From (A-31), we obtain (21).
, is valid. From (A-31), we obtain (21).
Let us introduce a function
![]() (A-42)
(A-42)
Differentiating (A-42) with respect to ![]() , we have
, we have
![]() (A-43)
(A-43)
Substituting (A-29) into (A-43), we obtain (22). ![]() is given as the initial condition of (14) for
is given as the initial condition of (14) for ![]() at
at ![]() . Here,
. Here, ![]() is given by
is given by
![]() (A-44)
(A-44)
Differentiating (A-44) with respect to ![]() , we have
, we have
![]() (A-45)
(A-45)
Substituting (A-34) into (A-45), we obtain (23). ![]() is given as the initial condition of (15) for
is given as the initial condition of (15) for ![]() at
at ![]() .
.
(Q.E.D.)
References
- Kwon, W. H. and Kwon, O. K. (1987). FIR filters and recursive forms for continuous time-invariant state-space models, IEEE Trans. Automatic Control, 32 (4): 352–356.
- Jazwinski, A. H. (1968). Limited memory optimal filtering, IEEE Trans. Automatic Control, 13 (5): 558–563.
- Schweppe, F. C. (1973). Uncertain Dynamic Systems, Prentice-Hall, Englewood Cliffs,
- N. J. Bruckstein, A. M. and Kailath, T. (1985). Recursive limited memory filtering and scattering theory, IEEE Trans. Information Theory, 31 (3): 440–443.
- Kwon, W. H., Kim, P. S. and Park, P. G. (1999). A receding horizon Kalman FIR filter for linear continuous-time systems, IEEE Trans. Automatic Control, 44 (11): 2115–2120.
- Han, S. H. Kwon, W. H and Kim, P. S. (2001). Receding-horizon unbiased FIR filter for continuous-time state-space models without a priori initial state information, IEEE Trans. Automatic Control, 46 (5): 766–770.
- Kwon, W. H., Kim, P. S. and Park, P. G. (1999). A receding horizon Kalman FIR filter for discrete time-invariant systems, IEEE Trans. Automatic Control, 44 (9): 1787–1791.
- Ahn, C. (2008). New quasi-deadbeat FIR smoother for discrete-time state-space signal models: an LMI approach, IEICE Trans. Fundam. Electron. Commun. Comput. Sci., vol. E91-A (9): 2671–2674.
- Ahn, C. K. and Han, S. H. (2008). New FIR smoother for linear discrete-time state-space models, IEICE Trans. Commun., E91-B (3): 896–899.
- Nakamori, S. and Sugisaka, M. (1977). Initial-value system for linear smoothing problems by covariance information, Automatica, 13 (6): 623–627.
- Nakamori, S. (2009). RLS fixed-lag smoother using covariance information in linear continuous stochastic systems, Appl. Math. Model., 33 (1): 242–255.
- Nakamori, S. (2007). Design of extended recursive Wiener fixed-point smoother and filter in discrete-time stochastic systems, Digital Signal Processing, 17 (1): 360–370.
- Nakamori, S. (2010). Design of RLS Wiener FIR filter using covariance information in linear discrete-time stochastic systems, Digital Signal Processing, 20 (5): 1310-1329.
- Nakamori, S. (2013). Design of RLS-FIR filter using covariance information in linear continuous-time stochastic systems,Applied Mathematics and Computation, 219: 9598-9608.
- Nakamori, S. (2014) Design of RLS Wiener FIR fixed-Lag smoother in linear discrete-time stochastic systems,CiiT International Journal of Programmable Device Circuits and Systems, 6 (8): 233-243.
- Sage, A. P., Melsa, J. L. (1971). Estimation Theory with Applications to Communications and Control, McGraw-Hill, New York.
- Kagiwada H. H. and Kalaba, R. E. (1968). Verification of the invariant imbedding method for certain Fredholm integral equations, Journal of Mathematical Analysis and Applications,. 23 (3): 540-550.
- Kagiwada, H. H., Kalaba, R. E. and Vereeke, B. J. (1968). The invariant imbedding numerical method for Fredholm integral equations with degenerate kernels, Journal of Approximation Theory, 1 (3): 355-364.
- Casti, J. L. and Kalaba, R. E. (1970). Proof of the basic invariant imbedding method for Fredholm integral equations with displacement kernels. Part II, Information Sciences, 2 (1): 69-76.
- Bellman, R. and Ueno, S. (1973). Invariant imbedding and the resolvent of Fredholm integral equation with composite symmetric kernel, Jounal of Mathematical Physics, 14: 1489-1490.
- Kagiwada, H. H., Kalaba, R. E. and Schumitzky, A. (1969). A representation for the solution of Fredholm integral equations, Proc. Amer. Math. Soc., 23: 37-40.
- Kagiwada, H. H. and Kalaba, R. E. (1975). Integral Equation via Imbedding Methods, Addison-Wesley.
- Koshel, K. V., Ryzhov, E. A. and Zyryanov (2014). V. N., A modification of the invariant imbedding method for a singular boundary value problem, Communications in Nonlinear Science and Numerical Simulation, 19 (3): 459-470.



