
International Journal of Mathematics and Computational Science, Vol. 1, No. 3, June 2015 Publish Date: May 16, 2015 Pages: 116-126
Smoothing and Solving Linear Quad-Level Programming Problem Using Mathematical Theorems
Eghbal Hosseini1, *, Isa Nakhai Kamalabadi2
1Payamenur University of Tehran, Department of Mathematics, Tehran, Iran
2University of Kurdistan, Department of Industy, Sanandaj, Iran
Abstract
The multi-level programming problems are attractive for many researchers because of their application in several areas such as economic, traffic, finance, management, computer science, informatics, transportation and so on. Among these, the quad-level programming problem (QLPP) is an appropriate tool to model these real problems because many real problems have four levels. It has been proven that even the general bi-level programming problem is an NP-hard problem, so the multi-level problem are practical and complicated problems therefore solving these problem would be significant. The literature shows several algorithms to solve different forms of the bi-level programming problems (BLPP). Not only there is no any algorithm for solving QLPP, but also it has not been studied by any researcher. The most important part in this paper is presentation and studying of a new model (QLPP) of multi-level problems. Also we attempt for developing two applied problems which would be modeled to the linear QLPP, then we attempt for developing an effective approach based on analyze theorems for solving the linear QLPP. In this approach, by using the heuristic method the QLPP is converted to a linear single problem. Finally, the single level problem is solved using the enumeration algorithm. The presented approach achieves an efficient and feasible solution in an appropriate time which has been evaluated by solving test problems.
Keywords
Linear Quad-Level Programming Problem, Heuristic Method, Enumeration Algorithm
Received: April 9, 2015 / Accepted: April 19, 2015 / Published online: May 11, 2015
@ 2015 The Authors. Published by American Institute of Science. This Open Access article is under the CC BY-NC license. http://creativecommons.org/licenses/by-nc/4.0/
Contents
1. Introduction 1.1. Global Techniques 1.2. Enumeration Methods 1.3. Meta Heuristic Approaches 2. The Linear Bi-Level and Tri-Level Programming Problems 3. Heuristic Algorithm (HA) to Solve QLPP 3.1. Main Theoretical Concepts 3.2. Steps of the Algorithm 4. Computational Results 5. Conclusion and Future Work Nomenclature
1. Introduction
It has been proven that the bi-level programming problem (BLPP) is an NP-Hard problem [1,2]. Several algorithms have been proposed to solve BLPP [11,12,13,21,25,26,27,28,29,31,32,33]. These algorithms are divided into the following classes: global techniques, enumeration methods, transformation methods [3,4,22,23], meta heuristic approaches, fuzzy methods [5,6,7,8,24], primal-dual interior methods [13]. In the following, these techniques are shortly introduced.
1.1. Global Techniques
All optimization methods can be divided into two distinctive classes: local and global algorithms. Local ones depend on initial point and characteristics such as continuity and differentiability of the objective function. These algorithms search only a local solution, a point at which the objective function is smaller than at all other feasible points in vicinity. They do not always find the best minima, that is, the global solution. On the other hand, global methods can achieve global optimal solution. These methods are independent of initial point as well as continuity and differentiability of the objective function [9,10,11,12,34,35].
1.2. Enumeration Methods
Branch and bound is an optimization algorithm that uses the basic enumeration. But in these methods we employ clever techniques for calculating upper bounds and lower bounds on the objective function by reducing the number of search steps. In these methods, the main idea is that the vertex points of achievable domain for BLPP are basic feasible solutions of the problem and the optimal solution is among them [14].
1.3. Meta Heuristic Approaches
Meta heuristic approaches are proposed by many researchers to solve complex combinatorial optimization. Whereas these methods are too fast and known as suitable techniques for solving optimization problems, however, they can only propose a solution near to optimal. These approaches are generally appropriate to search global optimal solutions in very large space whenever convex or non-convex feasible domain is allowed. In these approaches, BLPP is transformed to a single level problem by using transformation methods and then meta- heuristic methods are utilized to find out the optimal solution [15,16,17,18,19,25,36,40].
However there are many approaches to solve BLPP and this model of multi-level has been studied by many researchers, but there is no any attempt for modeling and presentation of QLPP. In this paper, the authors have tried to propose a new model of multi-level programming problem, QLPP, and then two applied examples which are modeled in QLPP form are proposed. Finally a new heuristic approach is proposed which is based on enumeration method and important theorems for solving QLPP in general and two applied examples specially.
The remainder of the pages is structured as follows: problem formulation and smooth method to the QLPP are introduced in Section 2. The algorithm based on analytic theorems and enumeration method is proposed in Section 3. Computational results are presented for our approach in Section 4. As result, the paper is finished in Section 5 by presenting the concluding remarks.
2. The Linear Bi-Level and Tri-Level Programming Problems
In this section models of bi-level and tri-level programming problems are introduced.
BLPP is used frequently by problems with decentralized planning structure. It is defined as [20]:
|
| (1) |
Where ![]() and
and ![]() and
and ![]() are the objective functions of the leader and the follower, respectively.
are the objective functions of the leader and the follower, respectively.
In general, BLPP is a non-convex optimization problem; therefore, there is no general algorithm to solve it. This problem can be non-convex even when all functions and constraints are bounded and continuous. Of course, the linear BLPP is convex and preserving this property is very important. A summary of important properties for convex problem are as follows, which ![]() and
and ![]() is a nonempty convex set in
is a nonempty convex set in ![]() :
:
(1) The convex function f is continuous on the interior of ![]() .
.
(2) Every local optimal solution of ![]() over a convex set
over a convex set ![]() is the unique global optimal solution.
is the unique global optimal solution.
(3) If ![]() then
then ![]() is the unique global optimal solution of
is the unique global optimal solution of ![]() over
over ![]() .
.
In a tri-level programming problem (TLPP), each decision entity at one level has its objective and its variables in part controlled by entities at other levels. To describe a TLPP, a basic model can be written as follows:
|
| (2) |
Where ![]() and the variables x, y, z are called the top-level, middle-level, and bottom-level variables respectively,
and the variables x, y, z are called the top-level, middle-level, and bottom-level variables respectively, ![]()
![]() the top-level, middle-level, and bottom-level objective functions, respectively. In this problem each level has individual control variables, but also takes account of other levels’ variables in its optimization function.
the top-level, middle-level, and bottom-level objective functions, respectively. In this problem each level has individual control variables, but also takes account of other levels’ variables in its optimization function.
We propose the QLPP model as following formulation:
|
| (3) |
Definition 2.1
The feasible region of the QLPP is
![]() (4)
(4)
On the other hand, if x be fixed, the feasible region of the follower can be explained as
![]() (5)
(5)
Based on the above assumptions, the follower rational reaction set is
![]() (6)
(6)
Where the inducible region is as follows
![]() (7)
(7)
Finally, the quad-level programming problem can be written as
![]() (8)
(8)
Definition 2.2
Every point such as ![]() is a feasible solution to quad -level problem if
is a feasible solution to quad -level problem if![]()
Definition 2.3
Every point such as ![]() is an optimal solution to the quad -level problem if
is an optimal solution to the quad -level problem if
![]() (9)
(9)
3. Heuristic Algorithm (HA) to Solve QLPP
3.1. Main Theoretical Concepts
In this section, main concepts and essential theorems in order to expansion of our algorithm
are discussed.
Definition 3.1:
If X be a bounded above set, then the least upper bound of X is called supreme and it is exhibited by Sup(X) and:
![]()
Definition 3.2:
If X be a bounded below set, then the greatest lower bound of X is called infmum and it is exhibited by Inf(X) and:
Theorme 3.1:
If X be a bounded above set and ![]() then for every small positive number such as
then for every small positive number such as![]()
Proof : ![]()
The proof is simple. Let ![]()
Because ![]() is positive then
is positive then ![]() and
and ![]() can not be supreme of X by defenition 1.
can not be supreme of X by defenition 1.
This is contradiction with supposition![]() . Therfore this assumption that
. Therfore this assumption that ![]() is false and then
is false and then
![]() Hence proof of theorem finished.
Hence proof of theorem finished.
Theorme 3.2:
If X be a bounded below set and![]() , then for every small positive number such as
, then for every small positive number such as ![]()
Proof : ![]()
Let![]()
Because ![]() is positive then
is positive then![]() and
and ![]() can not be supreme of X by defenition 1.
can not be supreme of X by defenition 1.
![]() This is contradiction with supposition
This is contradiction with supposition ![]() . Therfore this assumption that
. Therfore this assumption that ![]() is false and then
is false and then
Hence proof of theorem finished.
Theorme 3.3 [20]:
If X be a bounded and non- empty set then ![]()
Proof :
The proof of this theorem was given by [20].
Now consider the problem (3) and X, feasible space of (3), is a bounded set.
Let
![]() ,
, ![]() (10)
(10)
then:
![]() (11)
(11)
And
![]() (12)
(12)
Therefore
 (13)
(13)
And
![]()
![]()
![]()
Therefore
![]()
![]() (14)
(14)
Equation (11) is valid because x and y are fixed in the last level and they are controlled by the first and middle levels, therefore the last problem has only z as variable. By substituting equation (11) in (13), the problem (2) converts to the following single problem:
|
| (15) |





As mention that, in the above formulation using (14) is necessary to remove variable![]() . Also
. Also![]() are the last feasible values of
are the last feasible values of ![]() and
and ![]() (minimum (Inf) of
(minimum (Inf) of![]() ). It is easy to show that by removing these three constraints:
). It is easy to show that by removing these three constraints:
![]()
![]()
![]() µ
µ![]()
We can obtain a relaxation to the problem (15):
|
| (16) |
Let X and S are feasible spaces of (15), (16) respectively. The problem (16) is a single linear programming problem and the optimal solution of linear problems is a vertex point. To obtain optimal solution, problem (16) will be solved by the proposed algorithm and it calculates all the vertex points in S. We necessary vertex point in X and some of vertex points in S will be removed by theorems because ![]()
![]() , should be Minimum in other words
, should be Minimum in other words ![]()
![]() .
.
According to the theorems 1, 2, 3 it is easy to see that the following relations are contradictory with to minimize ![]()
![]() .
.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() Therefore if, then
Therefore if, then![]() .
.
Using the proposed algorithm and theorems all the vertex points in X are obtained and the optimal solution is calculated by enumeration method.
3.2. Steps of the Algorithm
In this section, steps of presented algorithm are proposed.
Step 1: We suppose that the objective function of the follower be a new variable and replace it in the leader objective function. Therefore the QLPP is changed into a single level problem. By applying this step, problem (3) is converted into (15), which is in linear form.
Step 2: The constraints related to u, v and w, three new variables which equal to the second, third and the last objective functions, are removed to obtain problem (16) (a relaxation to (15)).
Step 3: Finding all vertex points in problem (16). A vertex point is found by solving at least two constraints for a problem which has two variables. Also solving three constraints give a vertex point for a problem which has three variables and so on. These vertex points can be infeasible in (15). Step 4 proposes all feasible vertex points to problem (15).
Step 4: According to the proposed theorems each vertex point such as ![]() in S (feasible space of the problem (16) is a vertex point to X (feasible space of the problem (15)) if only if for each small positive number
in S (feasible space of the problem (16) is a vertex point to X (feasible space of the problem (15)) if only if for each small positive number ![]()
![]()
When the follower problems are minimization and
![]()
When the follower problems are maximization .
Objective functions correspond feasible vertex points in (15) are recorded.
Step 5: Finding the best objective function among recorded objective functions in step 4 as the best solution to BLPP.
4. Computational Results
To illustrate the algorithm, we first propose the practical following examples and then model them. Finally the proposed examples will be solved using our algorithm.
Example 1:
The supply-chain has four levels in decision: the first level is customs, the second level is products importer, the third level is products wholesaler and the last level is products badger. The decision maker at all four levels try to maximize their own benefits as their objective functions, and each has its own constraints and variables. The importer considers the decision-making process of the customs, the wholesaler considers the decision-making process of the importer, and the badger considers the decision-making process of the wholesaler. At the same time, the customs decisions take into account the reaction of the importer, the importer’s decisions take into account the reaction of the wholesaler, and the wholesaler likewise takes the reaction of the badger into account. The importer wants to maximize own profits and the wholesaler likes to maximize his (her) benefits and the badger wants to maximize own objective function. We establish this problem by a linear quad-level programming model to obtain the optimal solution to determine the cost and price. The model of the problem is simplified as follows:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Using (10-13) let
![]() ,
,![]()
![]()
Then:
![]()
And
![]()
Therefore
![]()
And

Therefore
![]()
the above problem is changed to the following problem:

![]()

![]()




![]()
![]()
![]() µ
µ![]()
![]()
Which![]() ,
,![]() are the smallest values of u, v, w. according to the proposed algorithm (step 2) three last constraints are removed and the following relaxation is obtained:
are the smallest values of u, v, w. according to the proposed algorithm (step 2) three last constraints are removed and the following relaxation is obtained:
![]()
![]()
![]()
Using enumeration method some of the vertex points are:
![]()
![]()
Now we have:
![]()
![]()
According to the Step 4, all the recent vertex points are infeasible and:
![]()
![]()
Therefore the problem has just this feasible vertex points:
![]()
Some feasible vertex point and objective functions at optimal solution are presented according to Table 1,2. Behavior of the variables in Example 1 has been shown in figure 1.
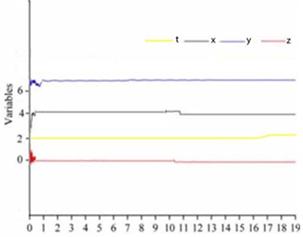
Figure 1. Behavior of the variables in Example 1.
Table 1. The feasible vertex points in Example 1.
|
|
| 30 |
|
|
| 10 |
|
|
| 10 |
|
|
| 21 |
Using above Table the optimal solution by the proposed algorithm as follows:
![]()
Table 2. Objective functions at optimal solution by Heuristic algorithm – Example 1.
| Optimal Solution | Objective function at best solution by HA |
| ( | (4,6,0,2) |
|
| 30 |
|
| 20 |
|
| -4 |
|
| 18 |
Example 2
In congestion pricing problem which provides an optimal price for vehicles entering the bridges or specified areas a QLPP model is the best model which in first level the income of the government that in this case usually the municipal is maximized whenever in the second level the tollgate wants to maximization his in the third level the drivers are trying to minimize their route from origin to the destination and in the last level users or passengers want to minimizing their costs. People in tollgate fully consider the decision-making process of the first level, the drivers fully consider the decision-making process of the second level, and the passengers consider the decision-making process of the drivers. At the same time, the first level decisions take into account the reaction of the second level, the second level decisions take into account the reaction of the drivers, and the drivers likewise take the reaction of the passengers into account. We have simplified the model of this problem arriving at following linear QLPP model.
|
|
Feasible vertex point and objective functions at optimal solution are presented according to Table 3,4. Behavior of the variables in Example 2 has been shown in figure 2.
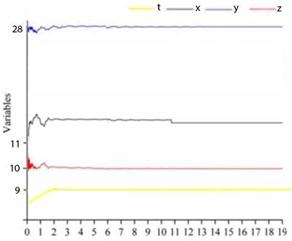
Figure 2. Behavior of the variables in Example 2.
Table 3. The feasible vertex points in Example 2.
|
|
| 100 |
|
|
| 27 |
|
|
| 39 |
|
|
| 45 |
Using above Table the optimal solution by the proposed algorithm as follows:![]()
Table 4. Objective functions at optimal solution by Heuristic algorithm – Example 2.
| Optimal Solution | Objective function at best solution by HA |
| ( |
|
|
| 100 |
|
|
|
|
|
|
|
| 94.5 |
5. Conclusion and Future Work
In this paper, a new model of multi-level programming problem which has four levels was been proposed. This model has not been studied already by any researcher. Also a new heuristic approach has been presented to convert the quad-level problem into a single level problem. Then, using the enumeration method all the vertex point of the linear single problem was been obtained. Utilizing the proposed mathematics analyze theorems the optimal solution was proposed. Our algorithm has acceptable numerical results and present good solutions. In the future works, the following should be researched:
(1) Examples in larger sizes can be supplied to illustrate the efficiency of the proposed algorithms.
(2) Showing the efficiency of the proposed algorithms for solving other kinds of QLPP such as quadratic and non-linear QLPP.
Nomenclature
|
| Objective function of the first level in the QLPP |
|
| Objective function of the second level in the QLPP |
|
| Objective function of the third level in the QLPP |
|
| Objective function of the fourth level in the QLPP |
|
| Slack variable |
| v | Slack variable |
|
| Slack variable |
|
| Objective function of the first level in the BLPP |
|
| Objective function of the first level in the BLPP |
|
| Constraints in the BLPP |
|
| Feasible region of the QLPP |
|
| Inducible region of the QLPP |
|
| The last feasible values of u |
|
| The last feasible values of v |
|
| The last feasible values of w |
|
| The least upper bound of X |
|
| The greatest lower bound of X |
|
| An arbitrary very small positive number |
|
| Optimal solution for the QLPP |
|
| Optimal solution for the TLPP |
|
| Optimal solution for the BLPP |
References
- J.F. Bard, Some properties of the bi-level linear programming, Journal of OptimizationTheory and Applications (1991) 68 371–378.
- L. Vicente, G. Savard, J. Judice, Descent approaches for quadratic bi-level programming, Journal of Optimization Theory and Applications (1994) 81 379–399.
- Lv. Yibing, Hu. Tiesong, Wang. Guangmin , A penalty function method Based on Kuhn–Tucker condition for solving linear bilevel programming, Applied Mathematics and Computation (2007) 1 88 808–813.
- G. B. Allende, G. Still, Solving bi-level programs with the KKT-approach, Springer and Mathematical Programming Society (2012) 1 31:37 – 48.
- M. Sakava, I. Nishizaki, Y. Uemura, Interactive fuzzy programming for multilevel linear programming problem, Computers & Mathematics with Applications (1997) 36 71–86.
- S Sinha, Fuzzy programming approach to multi-level programming problems, Fuzzy Sets And Systems (2003) 136 189–202.
- S. Pramanik, T.K. Ro, Fuzzy goal programming approach to multilevel programming problems, European Journal of Operational Research (2009) 194 368–376.
- S.R. Arora, R. Gupta, Interactive fuzzy goal programming approach for bi-level programming problem, European Journal of Operational Research (2007) 176 1151–1166.
- J. Nocedal, S.J. Wright, 2005 Numerical Optimization, Springer-Verlag, New York.
- A.AL Khayyal, Minimizing a Quasi-concave Function Over a Convex Set: A Case Solvable by Lagrangian Duality, proceedings, I.E.E.E. International Conference on Systems, Man,and Cybemeties, Tucson AZ (1985) 661-663.
- R. Mathieu, L. Pittard, G. Anandalingam, Genetic algorithm based approach to bi-level Linear Programming, Operations Research (1994) 28 1–21.
- G. Wang, B. Jiang, K. Zhu, (2010) Global convergent algorithm for the bi-level linear fractional-linear programming based on modified convex simplex method, Journal of Systems Engineering and Electronics 239–243.
- W. T. Wend, U. P. Wen, (2000) A primal-dual interior point algorithm for solving bi-level programming problems, Asia-Pacific J. of Operational Research, 17.
- N. V. Thoai, Y. Yamamoto, A. Yoshise, (2002) Global optimization method for solving mathematical programs with linear complementary constraints, Institute of Policy and Planning Sciences, University of Tsukuba, Japan 978.
- S.R. Hejazi, A. Memariani, G. Jahanshahloo, (2002) Linear bi-level programming solution by genetic algorithm, Computers & Operations Research 29 1913–1925.
- G. Z. Wang, Wan, X. Wang, Y.Lv, Genetic algorithm based on simplex method for solving Linear-quadratic bi-level programming problem, Computers and Mathematics with Applications(2008) 56 2550–2555.
- T. X. Hu, Guo, X. Fu, Y. Lv, (2010) A neural network approach for solving linear bi-level programming problem, Knowledge-Based Systems 23 239–242.
- B. Baran Pal, D .Chakraborti , P. Biswas, (2010) A Genetic Algorithm Approach to Fuzzy Quadratic Bi-level Programming, Second International Conference on Computing, Communication and Networking Technologies.
- Z. G.Wan, Wang, B. Sun, ( 2012) A hybrid intelligent algorithm by combining particle Swarm optimization with chaos searching technique for solving nonlinear bi-level programming Problems, Swarm and Evolutionary Computation.
- J.F. Bard, Practical bi-level optimization: Algorithms and applications, Kluwer Academic Publishers, Dordrecht, 1998.
- J.F. Bard, Some properties of the bi-level linear programming, Journal of Optimization Theory and Applications 68 (1991) 371–378.
- S Hosseini, E & I.Nakhai Kamalabadi. Line Search and Genetic Approaches for Solving Linear Tri-level Programming Problem International Journal of Management, Accounting and Economics Vol. 1, No. 4, 2014.
- S Hosseini, E & I.Nakhai Kamalabadi. aylor Approach for Solving Non-Linear Bi-level Programming Problem ACSIJ Advances in Computer Science: an International Journal, Vol. 3, Issue 5, No.11 , September. 5.
- SHosseini, E & I.Nakhai Kamalabadi.Two Approaches for Solving Non-linear Bi-levelProgramming Problem , Advances in Research Vol. 4, No.3 , 2015. ISSN: 2348-0394
- J. Yan, Xuyong.L, Chongchao.H, Xianing.W, Application of particle swarm optimization based on CHKS smoothing function for solving nonlinear bi-level programming problem, Applied Mathematics and Computation 219 (2013) 4332–4339.
- Xu, P, & L. Wang. An exact algorithm for the bilevel mixed integer linear programming problem under three simplifying assumptions, Computers & Operations Research, Volume 41, January, Pages 309-318 (2014).
- Wan, Z, L. Mao, & G. Wang. Estimation of distribution algorithm for a class of nonlinear bilevel programming problems, Information Sciences, Volume 256, 20 January, Pages 184-196(2014).
- Zheng, Y, J. Liu, & Z. Wan. Interactive fuzzy decision making method for solving bi-level programming problem, Applied Mathematical Modelling, Volume 38, Issue 13, 1 July, Pages 3136-3141(2014).
- Zhang , G, J. Lu , J. Montero , & Y. Zeng , Model. solution concept, and Kth-best algorithm for linear tri-level, programming Information Sciences 180 481–492 (2010) .
- A. Silverman. Richard, Calculus with analytic geometry, ISBN:978-964-311-008-6, 2000.
- Y. Zheng, J. Liu, Z. Wan, Interactive fuzzy decision making method for solving bi-level programming problem, Applied Mathematical Modelling, Volume 38, Issue 13, 1 July 2014, Pages 3136-3141.
- Y. Jiang, X. Li, C. Huang, X. Wu, An augmented Lagrangian multiplier method based on a CHKS smoothing function for solving nonlinear bi-level programming problems, Knowledge-Based Systems, Volume 55, January 2014, Pages 9-14.
- X. He, C. Li, T. Huang, C. Li, Neural network for solving convex quadratic bilevel programming problems, Neural Networks, Volume 51, March 2014, Pages 17-25.
- Z. Wan, L. Mao, G. Wang, Estimation of distribution algorithm for a class of nonlinear bilevel programming problems, Information Sciences, Volume 256, 20 January 2014, Pages 184-196.
- P. Xu, L. Wang, An exact algorithm for the bilevel mixed integer linear programming problem under three simplifying assumptions, Computers & Operations Research, Volume 41, January 2014, Pages 309-318.
- E. Hosseini, I.Nakhai Kamalabadi, A Genetic Approach for Solving Bi-Level Programming Problems, Advanced Modeling and Optimization, Volume 15, Number 3, 2013.
- E. Hosseini, I.Nakhai Kamalabadi, Solving Linear-Quadratic Bi-Level Programming and Linear-Fractional Bi-Level Programming Problems Using Genetic Based Algorithm, Applied Mathematics and Computational Intelligence, Volume 2, 2013.
- E. Hosseini, I.Nakhai Kamalabadi, Taylor Approach for Solving Non-Linear Bi-level ProgrammingProblem ACSIJ Advances in Computer Science: an International Journal, Vol. 3, Issue 5, No.11, September 2014.
- E. Hosseini, I.Nakhai Kamalabadi, Solving Linear Bi-level Programming Problem Using Two New Approaches Based on Line Search International Journal of Management sciences and Education, Vol. 2, Issue 6, 2014, 243-252.
- E. Hosseini, I.Nakhai Kamalabadi, Two Approaches for Solving Non-linear Bi-levelProgramming Problem, Advances in Research, 3(5), 2015.



