
International Journal of Automation, Control and Intelligent Systems, Vol. 1, No. 3, September 2015 Publish Date: Aug. 3, 2015 Pages: 66-72
Application of Adaptive Neuro-Fuzzy Regulators in the Controlled System by the Vehicle Suspension
Vladyslav Shuliakov*, Oleg Nikonov, Valentina Fastovec
Department of Information Technology and Mechatronics, Kharkov National Automobile and Highway University, Kharkiv, Ukraine
Abstract
The operation of adaptive neuro-fuzzy vehicle regulator created on the basis of the subtractive clustering method has been studied in the paper. The efficiency of control system functioning of the adaptive vehicle suspension using neuro-fuzzy regulators under ordinary and complicated conditions of operation has been considered. Two neuro-fuzzy regulators have been synthesized. The application of neuro-fuzzy adaptive regulator is possible in the design of electronic control system by sets, mechanisms, and units of vehicles, electromobiles, and hybrid vehicles. It can provide the development of new methods of diagnostics and prediction of the technical state of transport facilities providing high efficiency of their application and operation reliability.
Keywords
Neural Network, Fuzzy Logic, Control System, Adaptive Suspension, Efficiency, Car
Received: July 6, 2015
Accepted: July 22, 2015
Published online: August 2, 2015
@ 2015 The Authors. Published by American Institute of Science. This Open Access article is under the CC BY-NC license. http://creativecommons.org/licenses/by-nc/4.0/
1. Introduction
At present, application of the electronic control by vehicle suspension parameters – stiffness and the damping ratio of absorbers, road clearance change for optimal vehicle operation is the actual necessity.
Problems of comfort and vehicle safety have received much attention. In this case the successively higher requirements are placed upon the quality and the operational reliability of vehicle suspensions.
The method for tackling a problem of betterment of operational suspension characteristics is usually sought on the way to vibration damping. Recently upgrading of damping efficiency in the suspension has been connected with gain in its construction as a whole and isolated element. At present, a promising direction is creation of intellectual adaptive systems of suspension control. Betterment and application of such adaptive systems of vehicle suspension control make it possible to upgrade vehicle running smoothness and the following operational vehicular indices: stability, reliability, useful life, passability.
In the adaptive suspension the damping rate of absorbers is varied depending on the road pavement conditions running parameters and drivers inquiries. By a rate of damping is meant vibration damping speed which depends on resistance of absorbers and a value of sprung masses.
Nowadays, intensive development and practical application of neuro-fuzzy systems for controlling and monitoring of different technical-grade objects are observed [1-3]. The application of the neuro-fuzzy modeling technology is conditioned by the enhancement tendency of mathematical model complexity of actual systems. It is often impossible in principle to obtain exhaustive information for the construction of the mathematical model of the complex actual system. In these cases it is advantageous to use methods oriented to the construction of models taking into consideration incompleteness and inaccuracy of the input data. In such cases the neuro-fuzzy modeling technology is one of the most constructive [4].
Among neural networks for us the neuro-fuzzy networks are of particular interest [5-8]. The formation algorithm of these networks has been constructed on the basis of the fuzzy inference system, which requires the hand adjustment of parameters. It is the key obstacle to the application of fuzzy regulators in adaptive system. But considering the system of the fuzzy inference as the neural network the method of the back error propagation for the purpose of a search for optimal rates of the fuzzy inference system which correspond a condition of adequate training data display can be used.
The purpose of the paper is to construct the effective intelligent control system by adaptive vehicle suspension parameters on the application basis of intelligent regulators with the application of the fuzzy logic, artificial neural networks and methods of evolutional modeling. It makes possible to enhance power efficiency, reliability, no-failure operation, longevity, application safety of the above-mentioned vehicle units and assemblies.
2. The Neuro-Fuzzy Regulators Modeling in the Matlab (Simulink)
The task of control system improvement by the vehicle suspension has been set to the heart of the research. The set task is tackled owing to that the neuro-fuzzy regulator determined into the feedback along its deviation angle of a stabilization object is introduced into the control system by the vehicle suspension.
The control system by the vehicle suspension on the basis of the neuro-fuzzy regulation operates in the following manner. The required position of the vehicle body is given by the sensor of the turn rate and the angular transducer which are mounted on the vehicle body directly. It allows to measure, at all times stabilization object deviation from the given position in space. The neuro-fuzzy regulator is determined into the feedback along its deviation angle of a stabilization object.
If under the effect of the exciting moment, which are due to exterior factors, the stabilization object deviates from the given position to some angle then at the angular transducer output of the body level information makes its appearance entering the neuro-fuzzy regulator where the command is formed which is fed to the system input of executive drives, further. The system of executive drives creates the active stabilizing moment, which counteracts to the exciting moment and decreases angular divergence. The fuller stabilization moment will compensate the exciting moment, the less vehicle body deviation from the given position will be and the stabilization of its position will be carried out more precisely.
Let us consider the electrohydraulic servo drive described in works [9-11]. The Fig. 1 illustrates analytical model of the neuro-fuzzy controlled system. Fig. 2 shows the block diagram of the fuzzy regulator developed for the servo drive with the application of the subtractive clustering method. Fig. 3 presents the control unit of the above-mentioned drive in the environment of MATLAB (Simulink). The fuzzy regulator is determined in the feedback along the deviation angle of the stabilization object.
The modeling of the fuzzy regulator operation created on the basis of the electrohydraulic servo system and fuzzy regulators [12] has been performed.
The neuro-fuzzy regulators model uses the numerical values from the basic Simulink-model operation and it takes advantage of the outstanding properties of fuzzy logic, which allow the signal’s empirical processing without the use of mathematical analytical models.
The fuzzy regulator for the electrohydraulic servo drive on the basis of the adaptive neuro-fuzzy hybrid technology (fig. 2) has been synthesized by the use of ANFIS editor (Adaptive Neuro-Fuzzy Inference System) of the mathematical package Matlab.
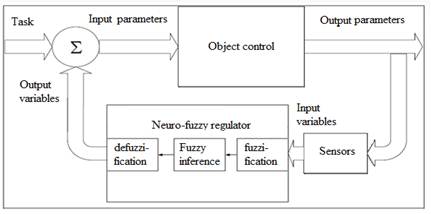
Fig. 1. Аnalytical model of the neuro-fuzzy controlled system.
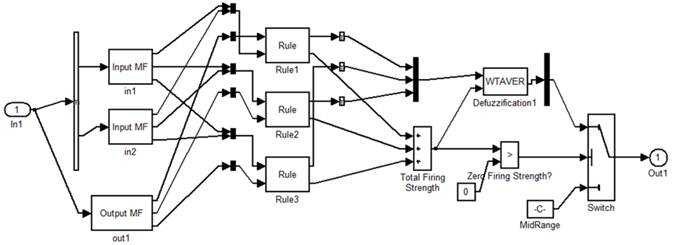
Fig. 2. Block diagram of the neuro-fuzzy regulator created with the application of the subtractive clustering method in the MATLAB (Simulink) environment.
The fuzzy model construction with the application of the subtractive clustering method in the Matlab (Simulink) environment can be divided into four steps:
The first step: data collection about the basic Simulink-model operation and creation of the data file for the fuzzy structure training;
The second step: preassignement of fuzzy system properties;
The third step: model training;
The fourth step: application of the developed fuzzy model in the unit of the fuzzy controller in the Simulink environment.
Figure 4 shows adjustments of the fuzzy regulator developed for the servo system in the editor of fuzzy inference systems (FIS).
The neuro-fuzzy network can be considered as one of a variety of Sugeno fuzzy inference systems. Membership functions of synthesized system which have been adjusted to minimize deviations between results of fuzzy modeling and experimental data.
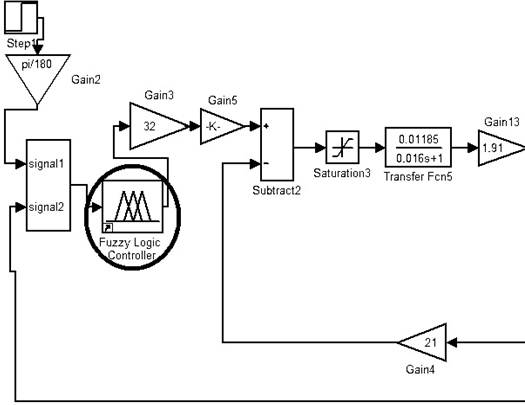
Fig. 3. Control unit of the electrohydraulic servo drive in the MATLAB (Simulink) environment.
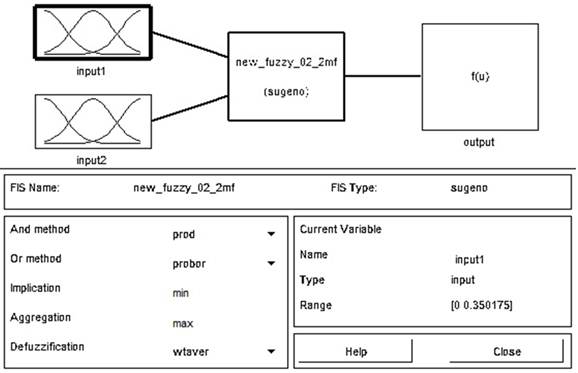
Fig. 4. Graphic interface of the FIS editor window for the neuro-fuzzy regulator of electrohydraulic servo drive control.
Let us consider the fuzzy model construction more closely:
In the first place, we choose the proposed training fetching.
In the second step we choose a generation method of the fuzzy structure – the subtractive clustering method (fig. 5).
Further, let us choose the optimization hybrid method which combines the back error propagation method with the least squares method.
Fig. 5-9 illustrate preassignement of parameters and synthesis of the neuro-fuzzy regulator created with the application of the subtractive clustering method.
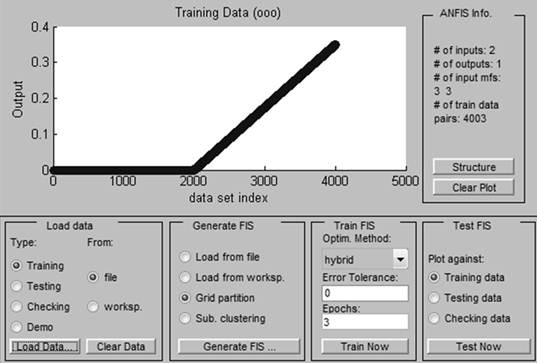
Fig. 5. Graphic interface of the Anfis Editor window for the neuro-fuzzy regulator created by the subtractive clustering method.
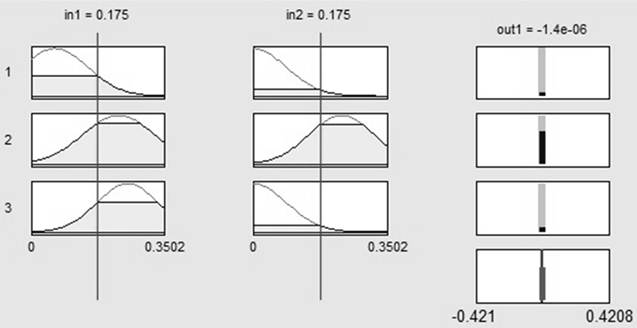
Fig. 6. Graphic interface of the Rule Viewer window for the neuro-fuzzy regulator created by the subtractive clustering method.
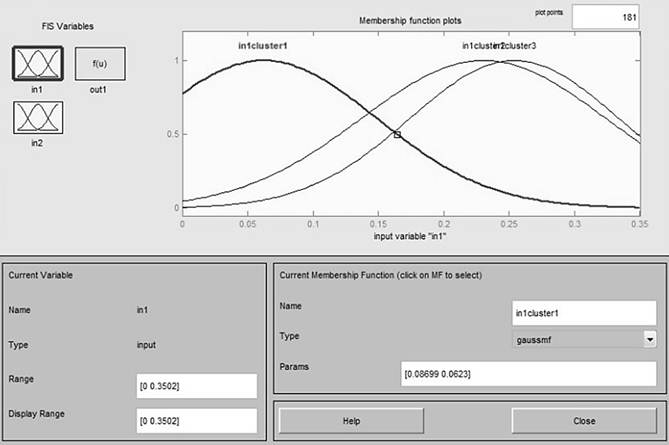
Fig. 7. Graphic interface of the Function Editor window for the neuro-fuzzy regulator created by the subtractive clustering method.
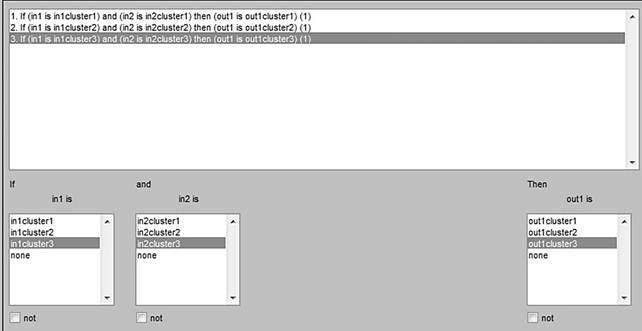
Fig. 8. Graphic interface of the Rule Editor window for the neuro-fuzzy regulator created by the subtractive clustering method.
As a result of the performed experiments the operation of the created fuzzy regulator with the application of the subtractive clustering method has been approbated. Obtained results are compared with results of the standard regulator and the regulator with the triangular function membership.
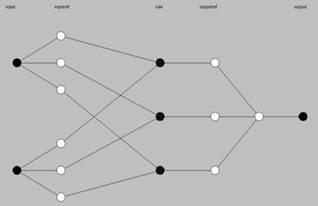
Fig. 9. Neuro-fuzzy Anfis network structure of the considered regulator.
Fig. 10-11 depict transient processes of the closed system of the electrohydraulic servo drive of the adaptive vehicle suspension for the standard regulator (curve 1), the fuzzy regulator with triangular function membership (curve 2), the regulator with the application of the subtractive clustering method (curve 3).
In a chosen value of stabilization object motion of 200 mm (fig. 10) for the regulator with the application of the subtractive clustering method (curve 3) overcontrol decrease was 100% comparing with the standard regulator (curve 1).
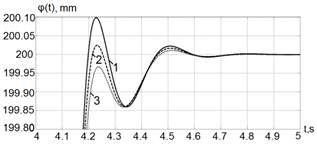
Fig. 10. Transient processes of the closed system of the electrohydraulic servo drive of the adaptive vehicle suspension operating in usual conditions of service for a value of stabilization object motion to 200 mm: 1 – standard regulator; 2 – regulator with triangular function membership; 3 – regulator with the application of the subtractive clustering method.
As illustrated in fig. 10 and a large body of experiments, the regulator with the application of the subtractive clustering method shows as a whole range of experimental values better results than the standard regulator and the regulator with triangular function membership.
Fig. 11 presents transient processes of the closed system of the electrohydraulic servo drive of the adaptive vehicle suspension, operating in complicated conditions of service at given by the control unit values for the standard regulator (curve 1), the fuzzy regulator with the application of the grid method with triangular function membership (curve 2) and the fuzzy regulator with the application of the subtractive clustering method (curve 3).
Fig. 11 shows transient processes of the closed system of the electrohydraulic servo drive of the adaptive vehicle suspension for a chosen value of control object motion (200 mm). As indicated in the figure the regulator created with the application of the grid method with triangular function membership (curve 2) and the regulator with the application of the subtractive clustering method (curve 3) make it possible to decrease both the index of overshoot and the time of control in comparison with the standard regulator (curve 1). Improvement makes up as much as 15 %.
In both cases the regulator with the application of the subtractive clustering method shows better still results than the regulator created by the grid method with the application of triangular function membership.
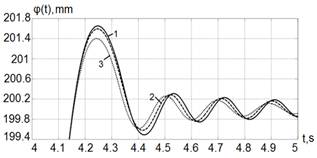
Fig. 11. Transient processes of the closed system of the electrohydraulic servo drive of the adaptive vehicle suspension operating in complicated conditions for a value of control object motion to 200 mm: 1 – standard regulator; 2 – regulator with triangular function membership; 3 – regulator with the application of the subtractive clustering method.
3. Conclusions
We considered two cases of the working model. The first model working under ordinary conditions as a model on an ordinary road with good road pavement, where the system is not under strong influence of external factors.
The second model working under complicated conditions as a model on a cross-country road with poor road conditions, where the unit generating a disturbing moment is put in the working model, simulating poor pavement.
Performed experimental researches in both cases provided support for the application efficiency of the subtractive clustering method for adaptive neuro-fuzzy regulators of the intelligence control system of the adaptive vehicle suspension.
The application of neuro-fuzzy regulators in control systems of electrohydraulic servo drives of the adaptive vehicle suspension made it possible to upgrade the quality of transient processes in adjustment. That is to decrease overshoot on a value of stabilization object motion up to 100 % in ordinary conditions and up to 15 % in complicated conditions of operation and the adjustment time. As well as introduction into the circuit of the neuro-fuzzy regulator system has enabled to expand a region of the system stability that allowed to improve system reliability.
The main application of such neuro-fuzzy regulators is proposed for using in the car's suspension control systems. It will give the opportunity to better support the vehicle running smoothness especially on cross-country roads. It can be also applied in brake adjuster, car doors and in the car seat stabilization systems.
References
- Gostev V., 2011, Design of fuzzy controller for automatic control systems, SPb.: BHV-Peterburg. – 2011. – 416 p. (in Russian)
- Kruglov V., Dli M., Golunov R., 2001, Fuzzy logic and artificial neural networks,Moscow: Fizmatlit. – 2001. – 221 p.(in Russian)
- Ali H., 2011, Fuzzy Controller Design of Servo System. – Asian Journal of Applied Science. – 2011. – № 4. – p. 403–413.
- Ross T., 2004, Fuzzy logic with engineering applications, Chichester: Wiley. – 2004. – 628 p.
- Rutkovskaja D., Pilin'skij M., Rutkovskij L., 2004, Neural networks, genetic algorithms and fuzzy systems, Moscow: Gorjachaja linija-Telekom. – 2004. – 452 p. (in Russian)
- Liu G., 2001, Nonlinear identification and control: a neural network approach, London: Springer. – 2001. – 210 p..
- Bodyanskiy Y., Kolodyazhniy V., Stephan A., 2001, An adaptive learning algorithm for a neuro-fuzzy network, Computational Intelligence. Theory and Applications. – 2001. – p. 68 – 75.
- Bodyanskiy Y., Yegorova E., Vynokurova O., 2008, Radial-basis-fuzzy-wavelet neural network with adaptive activation-membership function, Int. J. on Artificial Intelligence and Machine Learning. – 2008. – № 8. – p. 9 – 15.
- Bashta T., 1961, Hydraulic servo drives, Moscow: Mashgiz. – 1961. – 742 p. (in Russian)
- Gamynin N., 1972, Hydraulic drive of control system, Moscow.: Mashinostroenie. – 1972. – 376 p. (in Russian)
- Nіkonov O., Ul'ko V., 2010, The development of information and structural scheme of electrohydraulic servo drives of multipurpose vehicles, Vestnik NTU «KhPI». – 2010. – № 57. – p. 214 – 220. (in Ukrainian)
- Shuliakov V., 2013, Analysis of using subtractive clustering method when create fuzzy controllers of electrohydraulic servo drives of a car, Vіsnik NTU «KhPI». – 2013. – № 978.4. – p. 69 – 73. (in Ukrainian)



